
用 GPT-4 训练机器人!英伟达最新 Agent 开源:任务越复杂越拿手
英伟达 Eureka 在超过 80% 的任务中都超越人类专家,让机器人平均性能提升到 50% 以上。而且,近半数研究人员都是华人。
训练机器人,AI 比人类更拿手!
英伟达最新 AI AgentEureka ,用 GPT-4 生成奖励函数,结果教会机器人完成了三十多个复杂任务。
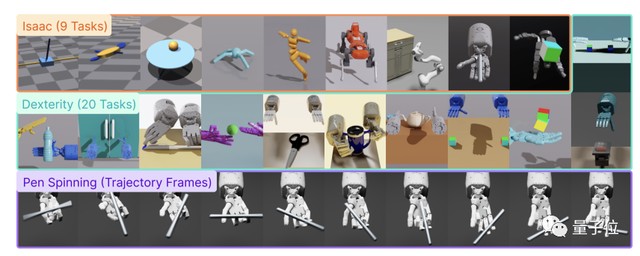
比如,快速转个笔,打开抽屉和柜子、抛球和接球。

尤其是转笔这个技能,要知道靠人类逐帧制作动画,也是非常困难的。
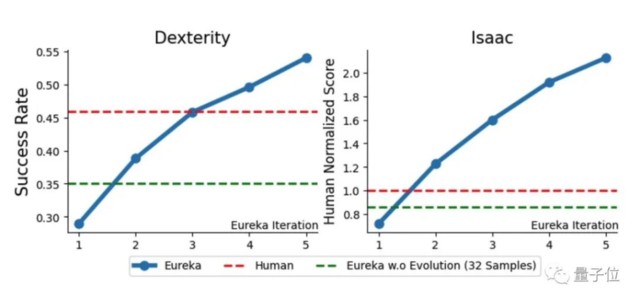
最终,Eureka 在超过 80% 的任务中都超越人类专家,让机器人平均性能提升到 50% 以上。
这一研究吸引了数十万网友关注,有人表示:直接快进到它弹钢琴那天,直接为大众所用。


英伟达科学家,也是此次共同作者之一 Jim Fan 评价到,它是超级人类奖励工程师。它可以辅助机器人工程师设计复杂任务。
目前该项目完全开源。
GPT-4 生成奖励策略
在机器人学习中,大模型擅长生成高级语义规划和中级操作,比如拾取和放置(VIMA、RT-1 等),但在复杂任务控制方面有所欠缺。
而 Eureka 的关键所在,就是通过上下文来实现了人类水平的奖励算法设计。
简单来说,就是用 GPT-4 的零样本生成、代码编写以及上下文改进功能,对奖励执行策略进行优化,由此通过强化学习来进行复杂的技能。
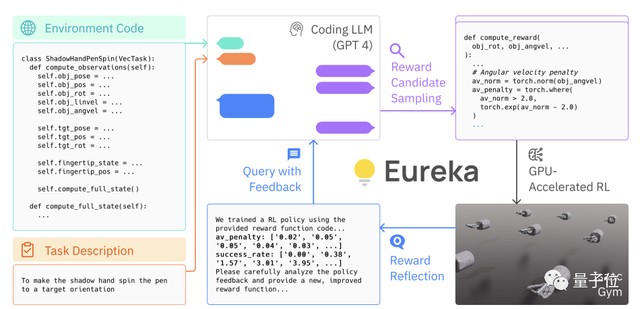
研究人员提出了一种混合梯度架构,外循环运行 GPT-4 来细化奖励函数(无梯度),而内循环运行强化学习来训练机器人控制器(基于梯度)。
主要有三个关键组成部分:
-
模拟器环境代码作为上下文启动初始 “种子” 奖励函数。
-
GPU 上的大规模并行强化学习,可以快速评估大量候选奖励。
-
奖励反射 reward reflection,得益于 GPT-4 评估和修改能力,一步步迭代。
首先,无需任何特定提示工程和奖励模版。使用原始Isaac Gym(一种 GPU 加速的物理模拟器)环境代码作为上下文,生成初始奖励函数。
这种无梯度的情境学习方式,可以根据各种形式的人类输入,生成性能更强、符合开发人员愿景的奖励函数。
其次,Eureka 在每个进化步骤中都会生成很多候选函数,然后利用强化学习训练来进行快速评估。
以往这种过程需要几天甚至几周来完成,但由 Isaac Gym 可将模拟时间提高 1000 倍,强化学习内循环能在几分钟完成。
最后,依赖于奖励反射,Eureka 还支持一种新形式的上下文 RLHF。它能够将人类操作员的反馈融入自然语言中,以引导和调整奖励功能。
最终,在 29 种不同的开源 RL 环境中,83% 基准测试中 Eureka 都优于人类,并实现了 52% 改进。
这些环境包括 10 种不同的机器人形态,比如四足机器人、四旋翼机器人、双足机器人、机械手等。
让研究人员惊讶的是,尤其在处理复杂、高维电机控制的任务上,Eureka 表现更好,且与人类奖励的相关性越低。
甚至在少数情况下,AI 的策略与人类的策略呈现负相关。
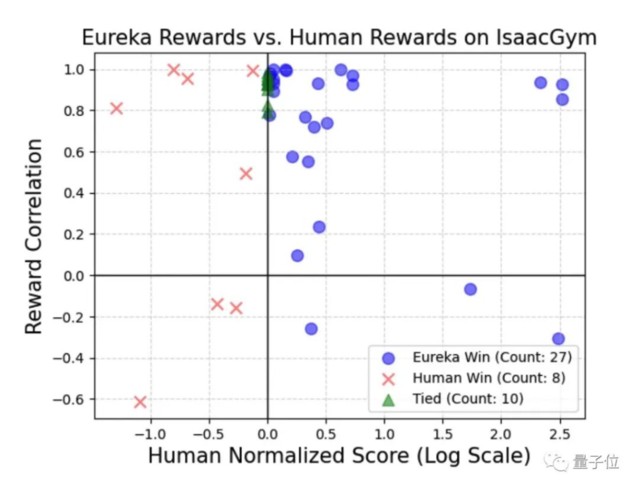
这就有点像当年 AlphaGo 的下棋策略,人类看不懂学不会,但十分有效。
英伟达出品
这项研究由英伟达、宾夕法尼亚大学、加州理工学院、德州大学奥斯汀分校的研究人员来完成。
可以看到的是,近半数研究人员都是华人。
一作是 Yecheng Jason Ma,目前是宾大 GRASP 实验室的四年级博士生,研究方向是强化学习和机器人学习。
英伟达科学家 Jim Fan 此次也是通讯作者之一。
咳咳,不过至于网友提到的弹钢琴,Jim Fan 自己曾分享过:只需几个简单按钮,AI 就能实时即兴生成演奏音乐。
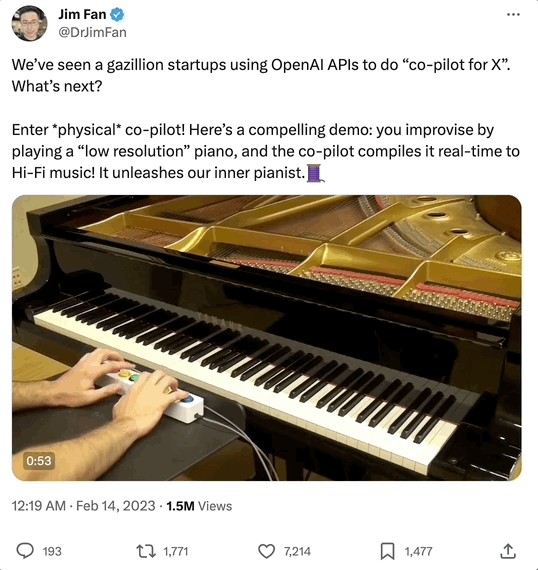
不知道,未来会不会这样的呢?(不过,这研究已经是 2018 年的了)
本文作者:白交,来源:,原文标题:《用 GPT-4 训练机器人,英伟达最新 Agent 开源:任务越复杂越拿手》
风险提示及免责条款
市场有风险,投资需谨慎。本文不构成个人投资建议,也未考虑到个别用户特殊的投资目标、财务状况或需要。用户应考虑本文中的任何意见、观点或结论是否符合其特定状况。据此投资,责任自负。